防夹手功能设置方法
2026/02/12
一、功能及注意事项
(1)功能说明:防夹手功能通过监测电机本身的运行状态来间接判断是否遇到异常阻力,使电机安全运行。此文档说明电机使用防夹手功能的方法。
(2)注意事项:具体以实际情况为准。
二、功能设置介绍
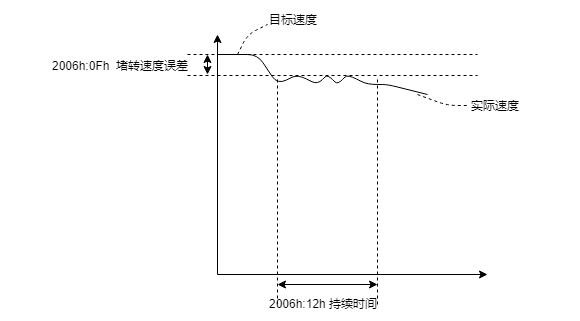
此功能可以通过判断速度偏差一定的时间,使电机停止转动并报堵转故障。
当速度的偏差H2006-0F(单位:1rpm)为0时,表示关闭此功能,当H2006-0F≠0时,表示
开启此功能。电机出厂默认关闭防夹手功能。
三、举例
例如:电机地址为1,在轮廓速度模式下,给定目标速度值1200rpm,当实际速度低于1100rpm,
且持续时间超过1s时,则电机报速度堵转故障,且停止转动。
| 指令名称 | CANopen报文 | Modbus报文(省略CRC校验码) |
| 设置速度偏差100rpm | 0601 2B 06 20 0F 64 00 00 00 | 01 10 01 56 00 01 02 00 64 |
| 设置持续时间1s | 0601 2B 06 20 12 E8 03 00 00 | 01 10 01 59 00 01 02 03 E8 |
| 保存参数 | 0601 23 10 10 01 73 61 76 65 | 01 10 00 26 00 02 04 65 76 61 73 |