Modbus通信协议与PLC地址对应关系表
2024/09/26
Modbus协议是工控领域中非常常见的通信协议之一,而PLC(可编程逻辑控制器)则是工业自动化领域中的核心设备。PLC内部使用特定的地址系统来标识其存储单元,而Modbus协议也有自己的一套地址系统。当使用Modbus协议与PLC进行通信时,需要将PLC的地址转换为Modbus协议所理解的地址。
以下内容是Modbus协议与PLC地址对应关系表,旨在说明两者之间的映射关系。
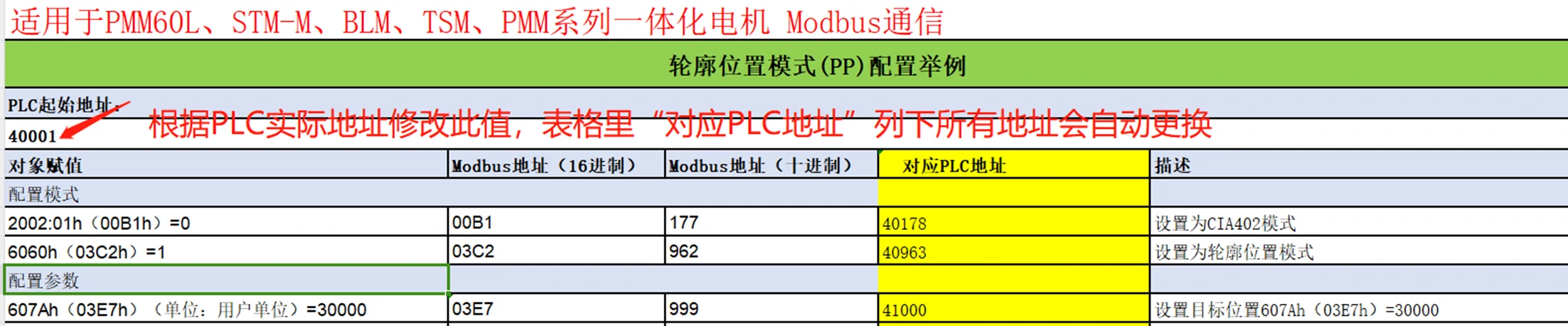
本文适用于PMM60L、STM-M、BLM、TSM、PMM等系列Modbus通信的一体化电机,理论上适用于所有应用了标准Modbus协议的设备。
注意事项:
1.依据所用PLC实际初始地址,修改表格中“PLC起始地址”值, “对应PLC地址”列下所有的参数对应的PLC地址会自动更新(此列嵌入了公式)。
2、配置示例仅做参考,用户可根据自己实际使用编写对应参数。关于电机使用更详细信息请参加所购产品对应通信手册及说明书。
相关内容:Modbus通信协议对象字典参数表
(一) 轮廓位置模式(PP)配置举例
| PLC起始地址: | ||||
| 40001 | ||||
| 对象赋值 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 配置模式 | ||||
| 2002:01h(00B1h)=0 | 00B1 | 177 | 40178 | 设置为CIA402模式 |
| 6060h(03C2h)=1 | 03C2 | 962 | 40963 | 设置为轮廓位置模式 |
| 配置参数 | ||||
| 607Ah(03E7h)(单位:用户单位)=30000 | 03E7 | 999 | 41000 | 设置目标位置607Ah(03E7h)=30000 |
| 6081h(03F8h) (单位:用户单位/s)=10000 | 03F8 | 1016 | 41017 | 设置目标速度6081h(03F8h)=10000 |
| 6083h(03FCh)(单位:用户单位/s2)=40000 | 03FC | 1020 | 41021 | 设置加速度6083h(03FCh)=40000 |
| 6084h(03FEh)(单位:用户单位/s2)=40000 | 03FE | 1022 | 41023 | 设置减速度6084h(03FEh)=40000 |
| 写控制字使电机使能 | ||||
| 6040h(0380h)=6 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x6,使电机准备 |
| 6040h(0380h)=7 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x7,使电机失能 |
| 6040h(0380h)=15 | 0380 | 896 | 40897 | 设置6040h(0380h)为0xF,使电机使能 |
| 使电机运行 | ||||
| 6040h(0380h)= 31 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x1F,绝对位置运动,非立刻更新 |
| 注意:6040h(0380h)= 0x(n)F→0x(n+1)F,为电机选择不同的运行方式,见下表 | ||||
| 监控参数 | ||||
| 6063h(03C6h) (单位:编码器单位) | 03C6 | 966 | 40967 | 电机当前的绝对位置反馈(编码器单位) |
| 6064h(03C8h) (单位:用户单位) | 03C8 | 968 | 40969 | 电机的当前位置(用户单位) |
| 注意:控制字6040h(0380h)= 0x(n)F→0x(n+1)F 不同的指令类型如下 | |||
| 6040h(0380h)-bit6 | 6040h(0380h)-bit5 | 6040h(0380h)变化 | 描述 |
| 0 | 0 | 0x0F → 0x1F | 绝对位置,非立刻更新 |
| 0 | 1 | 0x2F → 0x3F | 绝对位置,立刻更新 |
| 1 | 0 | 0x4F → 0x5F | 相对位置,非立刻更新 |
| 1 | 1 | 0x6F → 0x7F | 相对位置,立刻更新 |
相关对象
| 相关对象 | ||||
| 对象索引 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 605Dh(03C0h) | 03C0 | 960 | 40961 | 暂停方式选择 |
| 605Ah(03BFh) | 03BF | 959 | 40960 | 快速停机方式选择 |
| 6062h(03C4h) | 03C4 | 964 | 40965 | 驱动器内部当前目标位置指令值(用户单位) |
| 6063h(03C6h) | 03C6 | 966 | 40967 | 电机当前的绝对位置反馈(编码器单位) |
| 6064h(03C8h) | 03C8 | 968 | 40969 | 电机的当前位置(用户单位) |
| 607Ah(03E7h) | 03E7 | 999 | 41000 | 预设的目标位置(用户单位) |
| 607Bh(03E9h和03EBh) | 03E9 ,03EB | 1001 ,1003 | 5101,5103 | 位置范围限制(用户单位) |
| 607Dh(03EFh和03F1h) | 03EF,03F1 | 1007, 1009 | 5107,5109 | 目标位置的限制(用户单位) |
| 607Eh(03F3h) | 03F3 | 1011 | 41012 | 旋转方向(极性),详见“4.3 607Eh(03F3h):极性” |
| 607Fh(03F4h) | 03F4 | 1012 | 41013 | 运行过程中的最大轮廓速度(用户单位/s),起限制速度的作用。 |
| 6080h(03F6h) | 03F6 | 1014 | 41015 | 电机最大速度(rpm) |
| 6081h(03F8h) | 03F8 | 1016 | 41017 | 该段位移指令运行过程中的匀速阶段轮廓速度(用户单位/s),即定位期间到达加速度斜坡末端的速度。大小受607Fh(03F4h)限制。 |
| 6082h(03FAh) | 03FA | 1018 | 41019 | 轮廓终点速度,到达目标位置时的速度(用户单位/s),斜坡末端的速度,通常将该对象设置为零,这样在到达目标位置时速度正好减为0。大小受607Fh(03F4h)限制。 |
| 6083h(03FCh) | 03FC | 1020 | 41021 | 运行过程中的轮廓加速度(用户单位/s2),大小受60C5h(043Bh)限制。 |
| 6084h(03FEh) | 03FE | 1022 | 41023 | 运行过程中的轮廓减速度(用户单位/s2),大小受60C6h(043Dh)限制。 |
| 6085h(0400h) | 0400 | 1024 | 41025 | 执行"快速停机"时的停机减速度(用户单位/s2) |
| 6086h(0402h) | 选择规划器曲线即斜坡的类型, | |||
| 0402 | 1026 | 41027 | 若值为"0",则不会对冲击(加加速度)进行限制,即梯型曲线; | |
| 若值为"3",则将用60A4h:01h-02h(041Eh和0420h)中的值来限制冲击(加加速度),即S型曲线,本设备只使用了01h和02h索引。 | ||||
| 60C5h(043Bh) | 043B | 1083 | 41084 | 最大加速度限值(用户单位/s2) |
| 60C6h(043Dh) | 043D | 1085 | 41086 | 最大减速度限值(用户单位/s2) |
| 60F2 h(043Fh) | 043F | 1087 | 41088 | 定位选项 |
| 60FC h(0446h) | 0446 | 1094 | 41095 | 轨迹发生器的输出,即内部规划的实时位置指令(编码器单位) |
(二) 轮廓速度模式(PV)配置举例
| 轮廓速度模式(PV)配置举例 | ||||
| PLC起始地址: | ||||
| 40001 | ||||
| 对象赋值 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 配置模式 | ||||
| 2002:01h(00B1h)=0 | 00B1 | 177 | 40178 | 设置为CIA402模式 |
| 6060h(03C2h)=3 | 03C2 | 962 | 40963 | 轮廓速度模式 |
| 配置参数 | ||||
| 60FFh(0448h)= 50000;(单位: 用户单位/s) | 0448 | 1096 | 41097 | 写目标速度 |
| 6083h(03FCh)= 40000 (单位:用户单位/s2) | 03FC | 1020 | 41021 | 写轮廓加速度 |
| 6084h(03FEh)= 40000;(单位:用户单位/s2) | 03FE | 1022 | 41023 | 写轮廓减速度 |
| 写控制字使电机使能 | ||||
| 6040h(0380h)=6 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x6,使电机准备 |
| 6040h(0380h)=7 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x7,使电机失能 |
| 6040h(0380h)=15 | 0380 | 896 | 40897 | 设置6040h(0380h)为0xF,使电机使能 |
| 监控参数 | ||||
| 606Ch(03D5h)(单位:rpm) | 03D5 | 981 | 40982 | 当前的实际速度 |
(三) 轮廓转矩模式(PT)配置举例
| PLC起始地址: | ||||
| 40001 | ||||
| 对象赋值 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 配置模式 | ||||
| 2002:01h(00B1h)=0 | 00B1 | 177 | 40178 | 设置为CIA402模式 |
| 6060h(03C2h)=4 | 03C2 | 962 | 40963 | 设置为轮廓转矩模式 |
| 配置参数 | ||||
| 6071h(03DBh)= 500(单位:0.1%); | 03DB | 987 | 40988 | 写目标转矩 |
| 6088h(0405h)=2; | 0405 | 1029 | 41030 | 写转矩斜坡类型 |
| 6087h(0403h)=10; (单位:0.10%) | 0403 | 1027 | 41028 | 写转矩斜坡 |
| 写控制字使电机使能 | ||||
| 6040h(0380h)=6 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x6,使电机准备 |
| 6040h(0380h)=7 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x7,使电机失能 |
| 6040h(0380h)=15 | 0380 | 896 | 40897 | 设置6040h(0380h)为0xF,使电机使能 |
| 监控参数 | ||||
| 6077h(03E3h)(单位: 0.001N.m) | 03E3 | 995 | 40996 | 实际转矩 |
(四) 原点回归模式(HM)配置举例
| PLC起始地址: | ||||
| 40001 | ||||
| 对象赋值 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 配置模式 | ||||
| 2002:01h(00B1h)=0 | 00B1 | 177 | 40178 | 设置为CIA402模式 |
| 6060h(03C2h)=6 | 03C2 | 962 | 40963 | 设置使其工作在原点回归模式 |
| 设置原点回归方式 | ||||
| 6098h(0416h)=17; | 0416 | 1046 | 41047 | 设置原点回归方式为 17:负限位开关找寻原点方式 |
| 写寻找限位开关速度和寻找原点信号速度、回零加速度 | ||||
| 6099h:01h(0417h)= 10000,(单位: 用户单位/s) | 0417 | 1047 | 41048 | 设置寻找限位开关速度 |
| 6099h:02h (0419h)=1000;(单位: 用户单位/s) | 0419 | 1049 | 41050 | 设置寻找原点信号速度为 1000 |
| 609Ah(041Bh)=200000;(单位: 用户单位/s2) | 041B | 1051 | 41052 | 设置回零加速度为 200000 |
| 设置端子 | ||||
| 2003h:03h(00D5h)=15 | 00D5 | 213 | 40214 | 设DI1为 负限位开关功能 |
| 2003h:04h(00D6h)=0 | 00D6 | 214 | 40215 | 设DI1为低电平有效 |
| 写控制字使电机使能 | ||||
| 6040h(0380h)=6 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x6,使电机准备 |
| 6040h(0380h)=7 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x7,使电机失能 |
| 6040h(0380h)=15 | 0380 | 896 | 40897 | 设置6040h(0380h)为0xF,使电机使能 |
| 6040h(0380h)=31 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x1F,使电机运行 |
(五) 循环同步位置模式(CSP)配置举例
| PLC起始地址: | ||||
| 40001 | ||||
| 对象赋值 | Modbus地址(16进制) | Modbus地址(十进制) | 对应PLC地址 | 描述 |
| 配置模式 | ||||
| 2002:01h(00B1h)=0 | 00B1 | 177 | 40178 | 设置为CIA402模式 |
| 6060h(03C2h)=8 | 03C2 | 962 | 40963 | 设置使其工作在循环同步位置模式 |
| 写控制字使电机使能 | ||||
| 6040h(0380h)=6 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x6,使电机准备 |
| 6040h(0380h)=7 | 0380 | 896 | 40897 | 设置6040h(0380h)为0x7,使电机失能 |
| 6040h(0380h)=15 | 0380 | 896 | 40897 | 设置6040h(0380h)为0xF,使电机使能 |
| 上位机按照同步周期发送目标位置 | ||||
| 目标位置 607Ah(03E7h)(单位:用户单位) | 03E7 | 999 | 41000 | 上位机按照同步周期发送目标位置 607Ah(03E7h)用户单位 |
以上即是今天分享的全部内容,如果您有任何问题请及时联系我们。
˜ 本文章全部内容或部分内容禁止擅自转载、拷贝。