一体式步进伺服电机在无人艇载荷收放机构中的应用
进入21世纪以来,海洋经济和海上安全需求持续增长,无人船艇作为海洋新质生产力的重要代表正迎来快速发展阶段。专业机构研究显示,2023年全球无人艇产业规模已达1500亿元,预计2032年将突破万亿元。在这一浪潮中,国内无人船艇研发企业迅速崛起。

载荷收放机构是无人艇执行水下探测、采样、布放回收作业时的核心执行单元。典型的现代无人艇通常搭载测深仪、声呐、水质传感器等探测载荷,在进行水下作业时需要将传感器等载荷精确下放至预定深度,任务完成后有序回收。由于海上环境高湿高盐、风浪扰动频繁,载荷收放机构对驱动电机的体积、防护等级、控制精度和稳定性提出了极高要求。如何在有限舱体空间内实现安全、平稳、精确的载荷收放,成为行业发展的重要课题。
设备简介

无人艇载荷收放机构通常由绞盘、导轨、钢丝绳或线缆及相关传动部件构成,通过电机驱动实现载荷在水中的升起和下降。该机构的核心技术难点在于:
1. 空间极端限制: 无人艇甲板空间和舱体容积极为有限,必须选用体积小巧、集成度高的驱动部件,以减少对艇体其他设备的空间挤占。
2. 海洋环境严苛: 高温高湿、盐雾腐蚀、剧烈风浪等外部条件对电机的电气防护和机械可靠性构成严重考验。
3. 运动控制要求高: 载荷收放过程中需避免因运动抖动导致的载荷摇摆和数据波动,同时要保证下放位置的重复定位精度。长期运行过程中,机械传动间隙、编码器累积误差等因素会导致位置偏移,需要可靠的原点复位机制来消除误差。
4. 通信方式适应性: 在大中型无人艇中,主控系统通常采用MODBUS RTU协议通过485总线与各执行机构通信,以简化布线并提高系统可靠性。载荷收放机构的驱动部分需与该网络架构良好兼容。
在此背景下,一体化步进伺服电机凭借其高集成度、总线通信、闭环定位以及灵活的堵转回零功能,成为解决上述挑战的理想选择。
应用产品
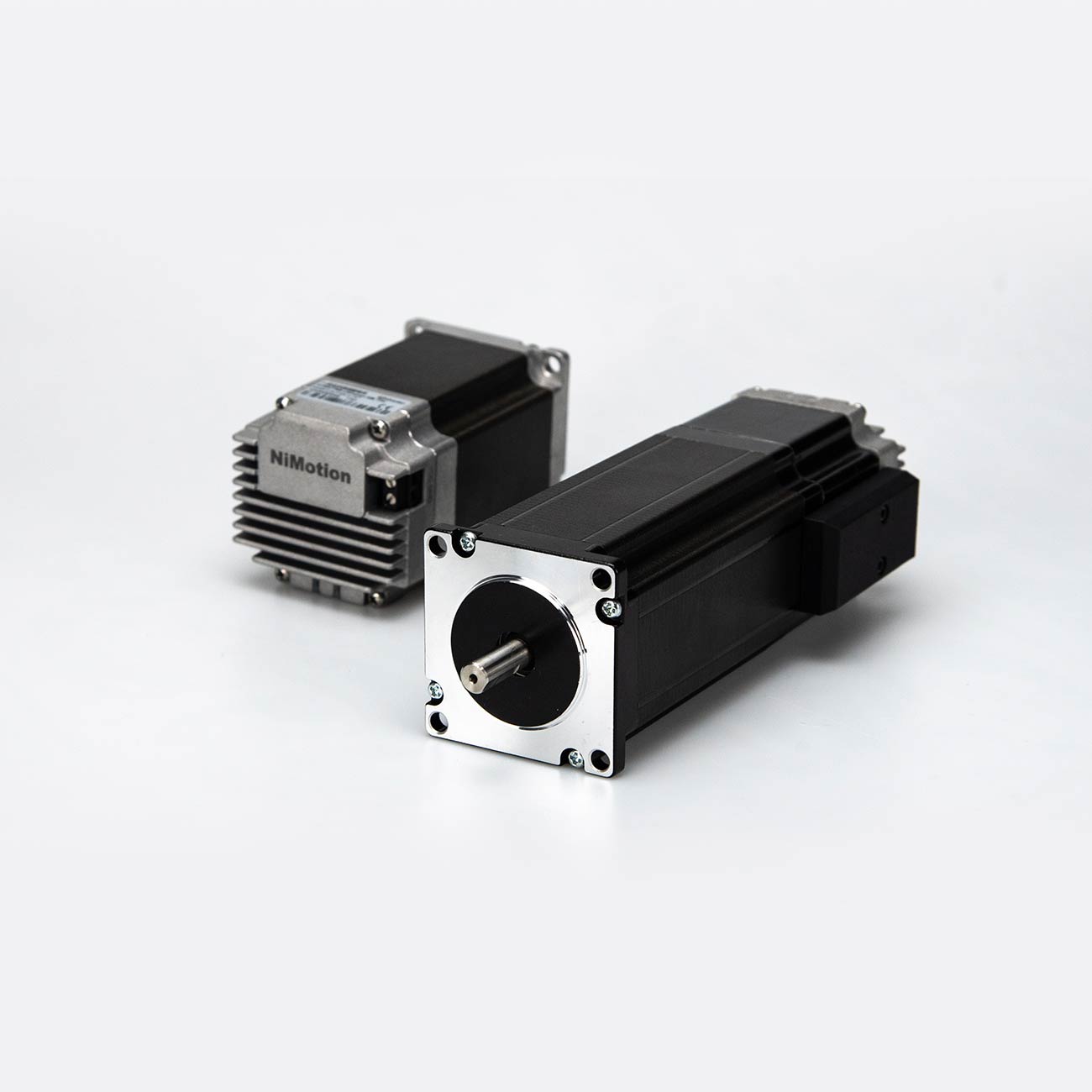
在本方案中,在无人艇载荷收放机构中选用了STM5741B-485-M-0FSB型一体式步进伺服电机,单台设备用量为1台。
STM5741B一体式步进伺服电机是一款将步进电机、伺服驱动器、编码器及控制器高度集成的小功率伺服产品。 其主要技术特点如下:
1. 高度集成、体积小巧: 将传统分体式的电机、驱动器和控制器合而为一,大幅减少设备体积与重量,简化了系统布线,降低了潜在故障点。对于舱体空间有限的无人艇而言,这一特性尤为关键。
2. 基于电压支持: 适配DC 10~36V输入电压,可根据电机的额定电流灵活配置,满足船载低压供电系统的应用需求。
3. 485总线通信: 内置RS-485接口并支持MODBUS RTU通信协议,简化了无人艇主控系统与载荷机构的电气连接,降低了复杂海洋环境下的布线故障率和系统维护工作量。
4. 多模式运动控制: 支持CIA402标准协议下的多种模式——PP轮廓位置模式、PV轮廓速度模式、PT轮廓转矩模式、HM原点回归模式等,为载荷收放机构提供了灵活的运动控制手段。
5. 内置堵转检测与原点回归功能: STM57系列电机支持堵转检测和失步补偿功能,可根据负载自动调整电流输出大小以降低电机温升,并支持堵转回原点方式实现可靠的位置复位。同时,电机搭载多种安全保护功能,具备过压、欠压、过热、过流、堵转报警等保护机制,通过LED闪烁直观显示电机当前状态。
6. 闭环控制防失步: 采用闭环控制模式可有效防止发生失步,在完成定位后能保持稳定的位置,无振荡现象,确保载荷收放过程中的运动平顺性。
应用方案
基于无人艇载荷收放机构的空间限制、海洋工况以及控制需求,设计了以下一体化步进伺服电机应用解决方案:
核心控制策略
方案充分利用了STM5741B电机灵活的运动控制模式,其核心控制策略包括以下两个层面:
第一,堵转回零方式消除机械结构累积误差。 无人艇载荷收放机构的传动系统在长期运行后,因机械间隙、编码器残差等因素会产生位置误差。传统的传感器限位回零方式需要额外安装行程开关等部件,不仅增加了机构的复杂性和成本,而且在海上高湿高盐环境下容易出现接触不良或失效问题。采用电机的堵转回零功能,可直接通过电机在机械限位处堵转时产生的电流/力矩突变信号来辨识原点位置,无需额外的硬件传感器,简化了机构设计并提升了回零操作的稳定性与可靠性。
第二,PP位置模式实现固定位置的精确走位。 载荷收放机构在作业过程中,需要以下放至特定水深、回收至原位等预设位置为目标进行精确运动。方案采用电机的PP轮廓位置模式,通过485总线向电机下发目标位置指令,电机按预设的速度和加(减)加速度参数平滑运动至目标位置,并在到位后保持静止。速度与加速度参数均可根据载荷的重量和惯性通过参数独立设置,以达到最优的运动平滑度。
系统架构
在电气架构上,STM5741B-485-M-0FSB电机通过RS-485总线接入无人艇的主控系统,采用MODBUS RTU通信协议进行数据传输。主控系统作为主机,电机作为从机,通过寻址方式下发使能信号、位置指令、速度指令等控制参数,同时读取电机的实时状态、当前位置及报警信息。该架构充分利用了485总线的抗干扰特性和远距离传输能力,适应了无人艇上复杂电气环境下的可靠通信需求。
遇到的问题与挑战
在无人艇载荷收放机构的实际研发和调试过程中,客户遇到了一系列技术挑战,主要集中在以下几个方面:
(一)位置累积误差问题
机械传动结构(如齿轮、丝杠、钢丝绳张紧机构)在长期运行后由于机械间隙和编码器累积误差逐渐增大,导致载荷下放位置偏离预设目标值。例如,经过多次重复收放操作后,载荷回收时的停止位置与原位出现明显偏差,影响机构下一次作业的起始精度。在恶劣海况下,船体摇摆还会加剧机械结构的相对位移,进一步放大了位置误差。
(二)485通信环境下的可靠控制
无人艇主控系统通过RS-485总线与各执行机构组网通信,载荷收放机构的驱动部分需在该网络架构下稳定运行。在实际应用中,需确保电机能够准确响应来自主机的每一个指令,并实时回传状态数据,以避免因通信延迟或丢包导致收放动作异常。
(三)运动抖动的控制
传统电机在载荷收放过程中,由于速度、加速度参数设置不匹配,时常出现运动抖动现象,导致绳索或线缆晃动、载荷受力不均,不仅影响了水下传感器数据的稳定性,也增加了传动部件的磨损和故障风险。
(四)机构空间及防护要求
无人艇的舱体空间有限,需要体积小型化的电机驱动系统,同时还要满足海上高湿、高盐、强风浪环境下的耐用性要求。
解决方案与效果
面对上述挑战,技术团队通过参数调优与模式适配,制定了针对性解决方案,取得了良好成效:
挑战一:位置累积误差的消除。 针对机械结构导致的位置误差问题,方案启用电机的堵转回零功能来实现每次作业前的原点精确标定。调试过程中,将堵转回原点速度参数(H6099-02)进行优化设定,确保电机在机械限位处平稳触及堵转状态并可靠识别原点位置,降低了堵转过程中的冲击和能耗。同时将堵转检测时间进行适配性调整,提高电机对堵转状态的响应速度。经过上述设定,电机每次上电后均能精准锁定零点位置,有效消除了传动结构和编码器的累积误差,显著提升了载荷收放机构的重复定位精度。
挑战二:运动抖动的抑制。 针对载荷收放中存在的运动抖动问题,方案充分利用了PP位置模式的速度和加加速度可设功能。技术人员根据载荷的重量、悬吊线缆的长度和惯量,通过参数调整确定了最优的速度曲线和加(减)加速度曲线,使电机在整个运动过程中保持平滑启停,消除了到位时的冲击震荡。电机的闭环控制模式也进一步抑制了运行过程中的转矩波动,使载荷在升降过程中保持稳定姿态。
挑战三:通信兼容性的实现。 方案充分利用处理器内置的RS-485接口以及MODBUS RTU通信协议,通过标准化的主从寻址机制实现了上位机与电机之间的双向数据传输。通信参数(波特率、数据位、停止位等)与云洲智能主控系统的通信配置保持一致,确保了载荷收放机构与整船其他设备之间的高效协调。电机支持查询报警和历史报警记录的功能,也为远程维护和故障诊断提供了便利。
挑战四:空间限制的克服。 STM5741B一体式结构将电机、驱动器、控制器和编码器整合于单一设备之中,在标准电机外形的基础上仅增加了少量长度,占用空间极小,能够轻松部署于无人艇有限舱体空间内。紧凑的设计也简化了线缆布线,降低了海上复杂环境中的故障隐患点。
最终,通过上述方案的实施,STM5741B电机在无人艇载荷收放机构中的应用达到了以下应用效果:
每次任务前通过堵转回零实现高精度位置校准,有效消除了长期运行中的位置累积误差;
PP位置模式下载荷收放运动平稳流畅,到位冲击小,抖动抑制效果显著;
485总线通信稳定可靠,与主控系统的数据交互及时准确;
电机温升控制在正常范围,运行噪音较低,机构整体可靠性得到增强。
总结
一体式步进伺服电机在无人艇载荷收放机构中的成功应用,充分体现了高集成度运动控制组件在水下无人平台领域的广阔应用前景。在空间受限、工况恶劣的无人艇环境中,STM5741B电机凭借其高度一体化设计、闭环控制以及灵活多样的运动模式,有效解决了机械结构导致的累积位置误差、运动抖动等实际问题。其中,堵转回零功能的应用实现了一种无需额外传感器、简单可靠的原点定位方式,而PP位置模式的速度和加加速度可设特性则为载荷收放的平顺运行提供了精确控制手段。
该应用充分表明,一体式步进伺服电机凭借其高度集成、通信兼容性强及灵活的堵转回零功能,非常适合作为无人艇载荷收放等水下作业机构的驱动方案。它为海上智能装备的精细化运动控制提供了切实可行的技术路径,也为类似应用中电机选型与控制方案设计提供了有价值的参考范例。